
精品 A01G1/00
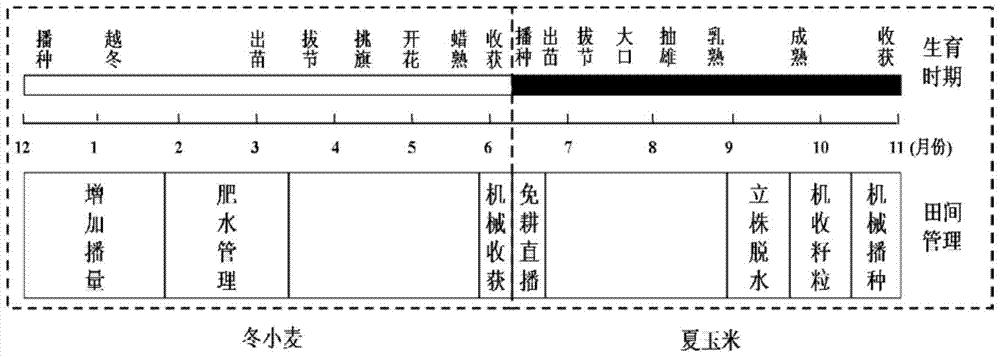
本发明提供了小麦冬寄籽‑玉米机收粒周年高产高效种植模式,小麦播种时间为11月下旬至12月上旬,或10cm地温下降到2℃以下进行播种,小麦播种时增加播种量,籽粒在越冬期处于萌发但不出苗,小麦在春季出苗后及时进行肥水管理,在6月初进行收获;小麦收获后进行种植夏玉米,玉米延迟至10月底至11月上旬收获。本发明的有益效果是小麦冬寄籽避开了由于早播带来的徒长及冬季冻害、干旱对产量造成的影响,玉米机收粒延长了玉米的生长时间,增加玉米籽粒在植株上的干物质积累时间,实现籽粒完熟和机械化收获,实现黄淮海地区两熟季节间资源优化配置及周年全程机械化作业,提高黄淮海区两熟制周年生产能力。
精品 A01B79/02
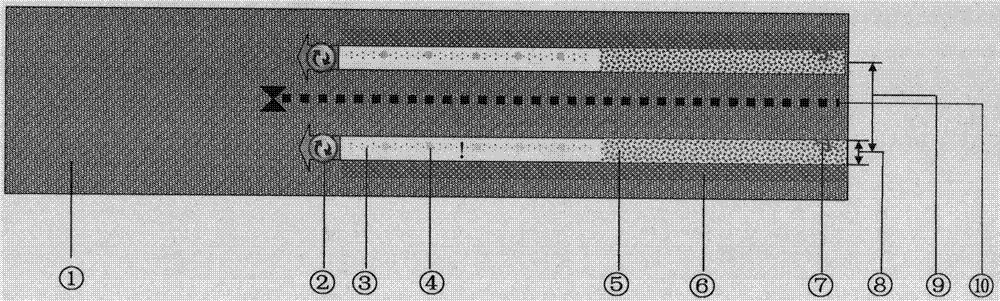
本发明提供一种玉米推茬清垄旋耕播种方法,属于农作物栽培技术领域。其特征是在前茬秸秆堆积的地块,播种带的行内进行推茬清垄、深层施肥、单粒精量播种,并配合喷水和喷药,在播种带之间进行深旋松土和秸秆覆盖等多项作业过程,通过机械一次性完成。其推茬清垄技术是在苗带处将前茬的秸秆进行切断、粉碎,并将其推出播种带,滞留在非播种带处,同时进行10cm左右深度的浅旋,形成播种带无秸秆或少秸秆,地表土壤疏松的苗带。推茬清垄后并配合深旋松土、深层施肥、精量播种等技术,形成了一种轻简化、低耗能玉米高产高效的种植方法,可有效解决前茬秸秆堆积、播种质量差、耕层浅犁底层坚实和群体整齐度低等玉米生产难题。
精品 G06V20/10
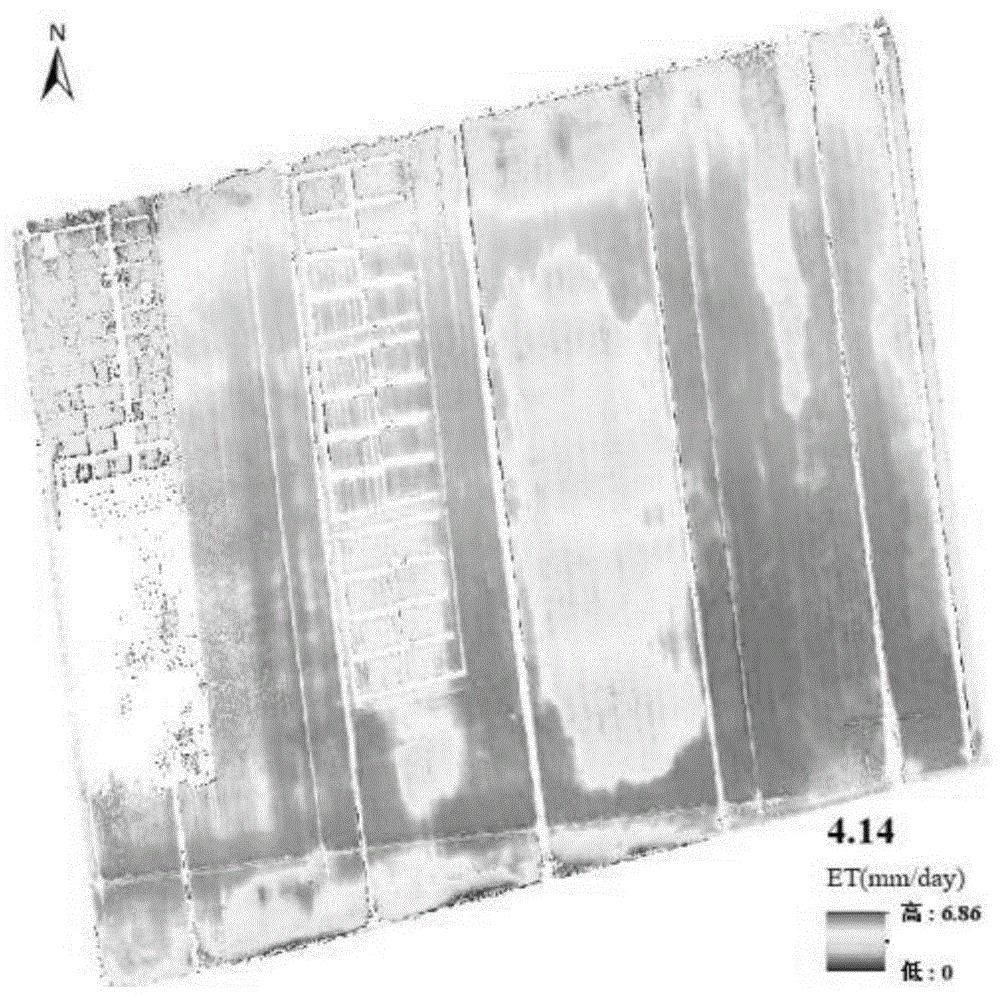
本发明涉及一种基于无人机光谱数据的灌溉处方图反演方法,包括以下步骤:(1)遥感数据采集;(2)遥感影像作物信息提取;(3)田间蒸散发时空分布估算;(4)田间数据采集:无人机飞行日同步田间取样,获得土壤根系吸水层有效可利用土壤水分含量和田间持水量;(5)通过历史气象灌溉资料、实时热红外、多光谱高分辨率遥感影像数据、地面传感器的墒情信息数据,结合不同的灌溉技术反演的灌溉处方图。本发明中无人机携带光谱感知系统,获取田间热红外、多光谱、可见光影像,通过植被提取,计算作物冠层水分亏缺,结合田间蒸散发空间分布开展灌溉处方图反演,为精准灌溉提供数据信息支撑。
精品 G06V20/10
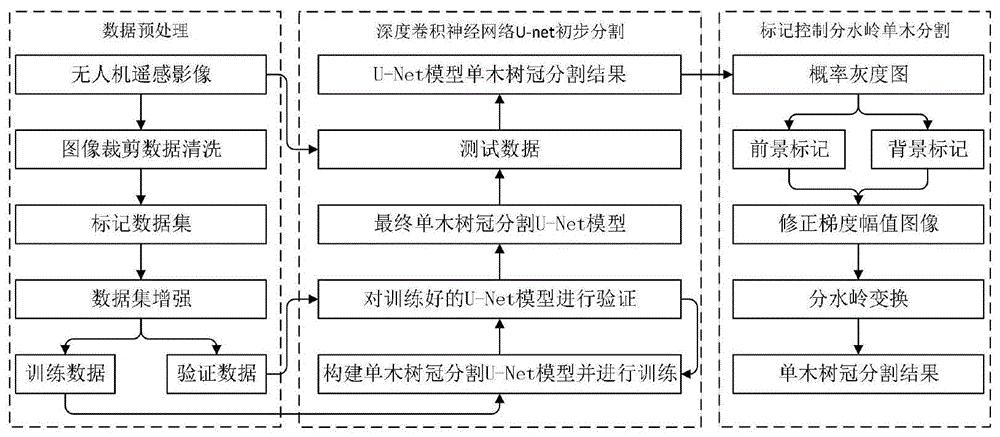
本发明公开一种从高分辨率无人机可见光遥感影像中提取单株植物冠层的方法,其包括以下内容:一、对获取的无人机遥感数据进行预处理,裁剪、清洗、标注数据集;二、利用深度卷积神经网络U‑Net得到冠层初步分割结果,使用标注好的数据集对U‑Net模型进行训练,用训练好的U‑Net模型对图像进行分割,得到概率灰度图;三、基于标记控制分水岭算法对概率灰度图进行优化,得到最终单株植物冠层分割结果。本发明利用U‑Net算法可以在一定程度上避免自然条件下原始图像背景复杂,光照强度不均对冠层分割的干扰,得到冠层的初始轮廓,标记控制分水岭算法能够较好的分割单株植物冠层,用于对U‑Net提取的冠层结果进行优化,提取单株植物冠层信息、郁闭度精度更高、速度更快。
精品 G06V20/17
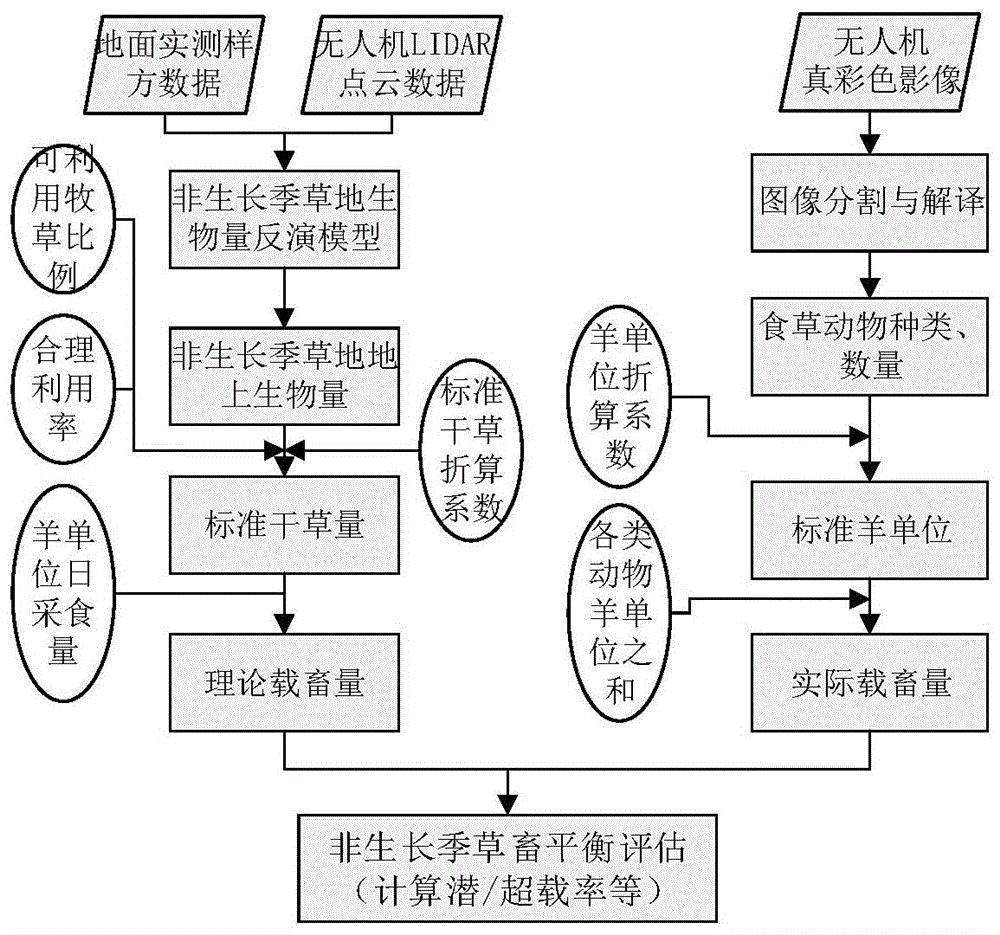
本发明提供一种基于无人机LIDAR航测技术的非生长季草畜平衡评估方法,可有效克服传统卫星遥感不能监测干枯植被和食草动物信息的缺点,面向枯草期草原开展草畜平衡监测,包括以下步骤:基于坡度‑角度‑距离限制的地形提取法,对无人机LIDAR点云数据进行分类,根据分类得到的地面点和植被点,计算非生长季的草地植被覆盖度和冠层高度,实现非生长季草地地上生物量反演;基于面向对象和监督分类法,获得可利用牧草比例、草地合理利用率等参数,计算理论载畜量;根据食草动物种类、数量、和每种动物的羊单位换算公式,计算实际载畜量;最后,根据理论载畜量和实际载畜量,计算超载率、剩余牧草可利用天数及需补饲牧草量,完成非生长季草畜平衡状况评估。
精品 G06V20/10
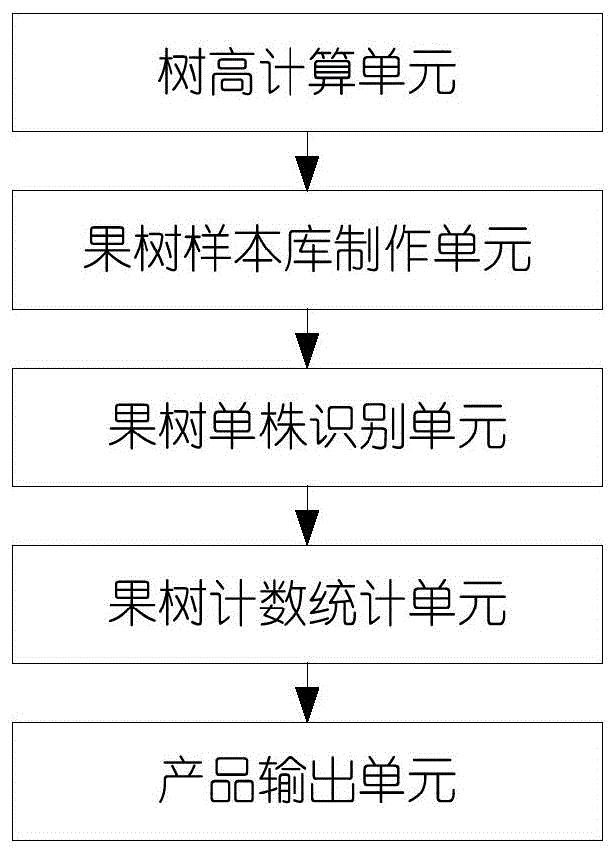
本发明提出一种基于无人机数据采集的果树识别和数量监测方法,包括:S1,对无人机采集的图像数据提取果树树高数据,将果树树高数据转化为假彩色图像;S2,将果树树高假彩图裁剪成多个子图像,标注子图像中代表果树的不规则点作为果树训练样本库;S3,对果树训练样本库进行果树单株识别模型的训练;S4,以统一坐标系为基础,将果树树高假彩图裁剪为小图,剪裁后的小图与其四周临近图像保持重叠度,利用果树识别模型逐一识别小图中的果树并记录果树在小图中的位置信息,将所识别的果树的位置进行坐标转换,将图像重叠部分所识别的果树进行合并处理。本发明解决了树木影子和杂草对无人机遥感图像处理产生影响,提高了果树识别和数量统计精度。
精品 B64D47/02
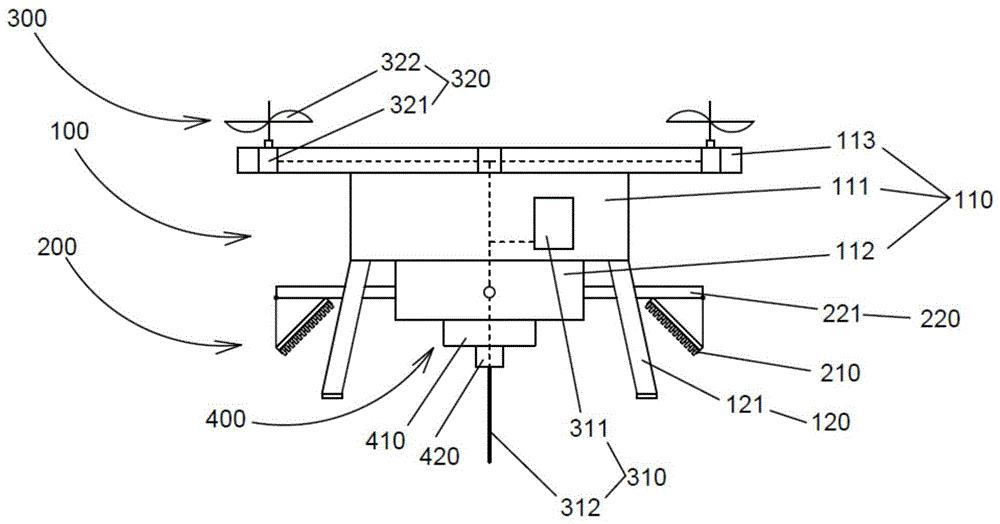
本发明涉及一种基于无人机的农业照明装置及方法,该系统包括用于为动植物生长区域提供光照的光源部,用于提供电能并利用电能进行驱动的动力部,用于承载和/或连接光源部及动力部的壳体部,动力部能够通过壳体部以带动光源部在预设轨迹上移动和/或悬停,以使得动力部在保证光源部能够在预设位置向对应生长区域发射出预设光照参数光线的情况下,基于若干生长区域获取的实时环境参数,通过调节驱动单元的驱动参数以生成或调节朝向于对应生长区域的下洗气流,从而通过下洗气流完成不同生长区域间的气体流通。
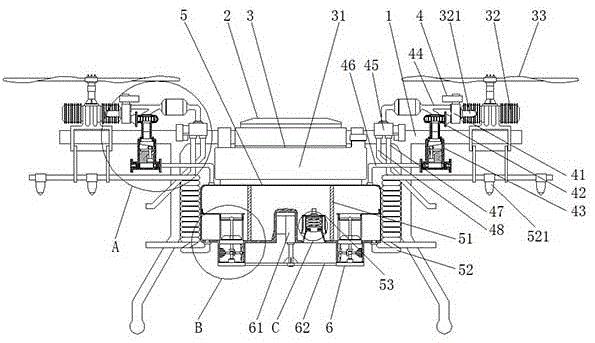
精品 B64D1/18
本发明的一种智能无人机,包括机架,所述机架上设置有飞控系统、动力系统和喷洒箱,其中动力系统包括油箱、若干个发动机和旋翼,所述机架上安装有若干个气能利用组件,气能利用组件与发动机的排气管连接,且气能利用组件与喷洒箱连接,并且气能利用组件与喷洒箱一侧的喷液管配合连接,所述喷洒箱的底部设置有自封闭加液口组件,且喷洒箱的底部设置有风动旋撒组件。本发明中,通过气能利用组件能够同时利用发动机排放尾气的流动动能和温度热能,其中尾气的流动动能能够转化为对喷洒箱加压的动力,而尾气的温度热能能够对喷射前的药液进行预热,无需设置主动的喷射动力和加热机构,能极大的减少能源消耗,让无人机在植保工作中拥有更长的续航。
精品 G05D1/10
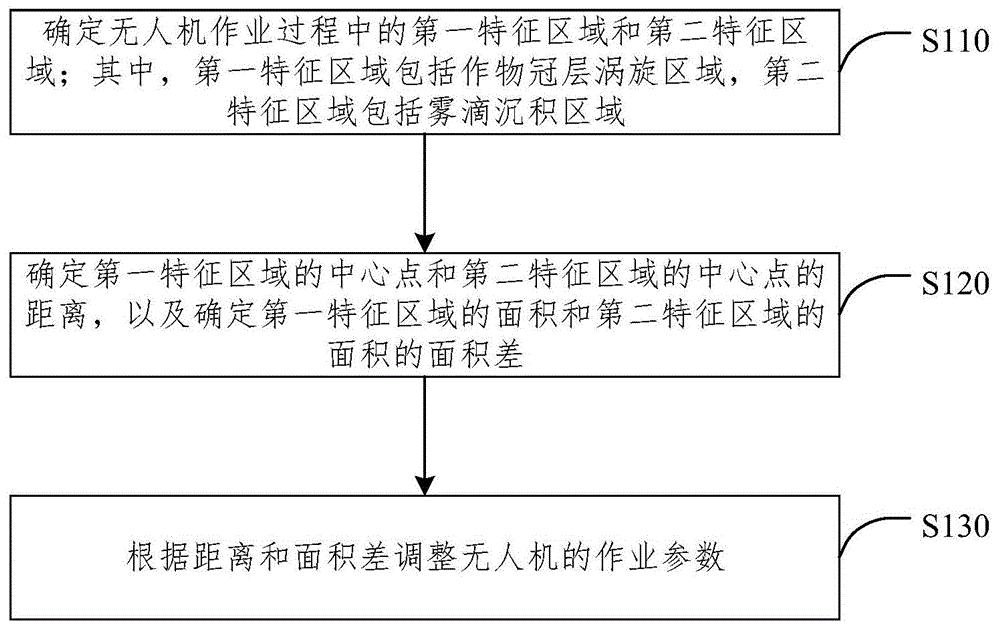
本公开涉及一种基于无人机的喷雾方法装置、电子设备和介质;其中,该方法包括:确定无人机作业过程中的第一特征区域和第二特征区域;其中,第一特征区域包括作物冠层涡旋区域,第二特征区域包括雾滴沉积区域;确定第一特征区域的中心点和第二特征区域的中心点的距离,以及确定第一特征区域的面积和第二特征区域的面积的面积差;根据距离和面积差调整无人机的作业参数。本公开实施例在作业过程中能够调整无人机的作业参数以使得作物冠层涡旋区域和雾滴沉积区域重叠,且冠层涡旋区域主动包含雾滴沉积区域,从而提高喷雾精准度,获得最佳的作业效果。
精品 A01N25/12
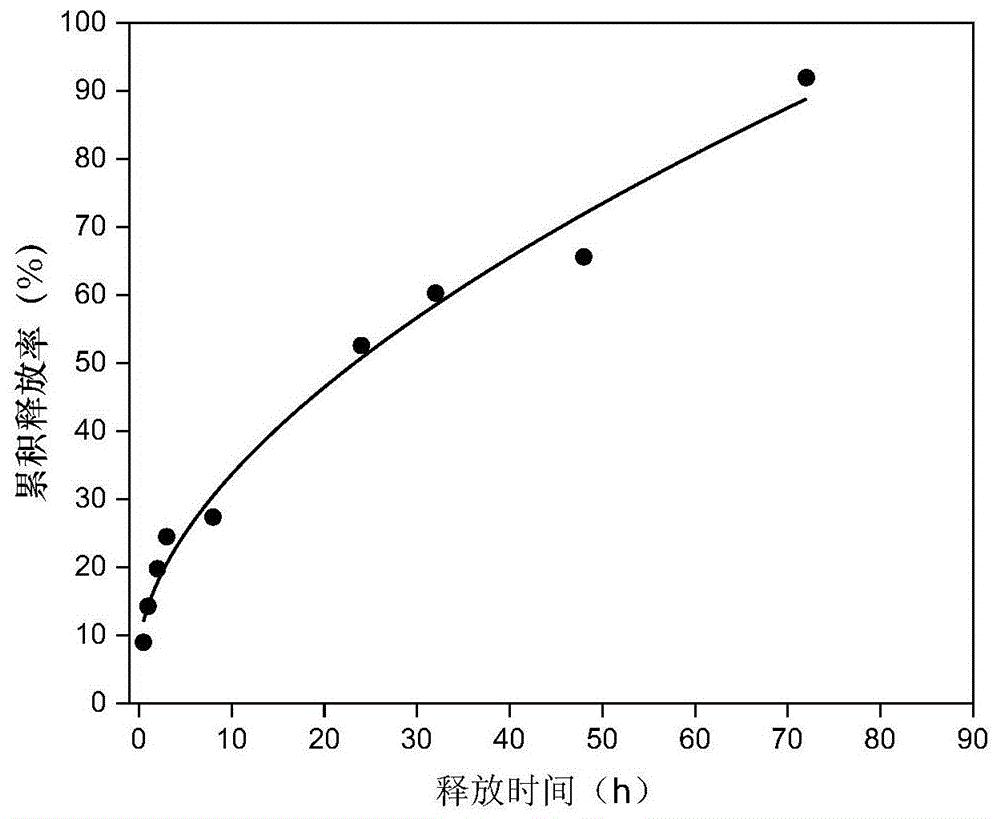
本发明公开了属于农药范围的一种适用于农用无人机撒施的颗粒剂。所述颗粒剂可以直接用于无人机撒施,且具有缓释性能。所述颗粒剂尤其适用于防治在作物幼嫩部位尤其是心叶危害的害虫,能在自然重力和无人机下旋气流共同作用下到达作物心叶底部。
精品 B64D1/16
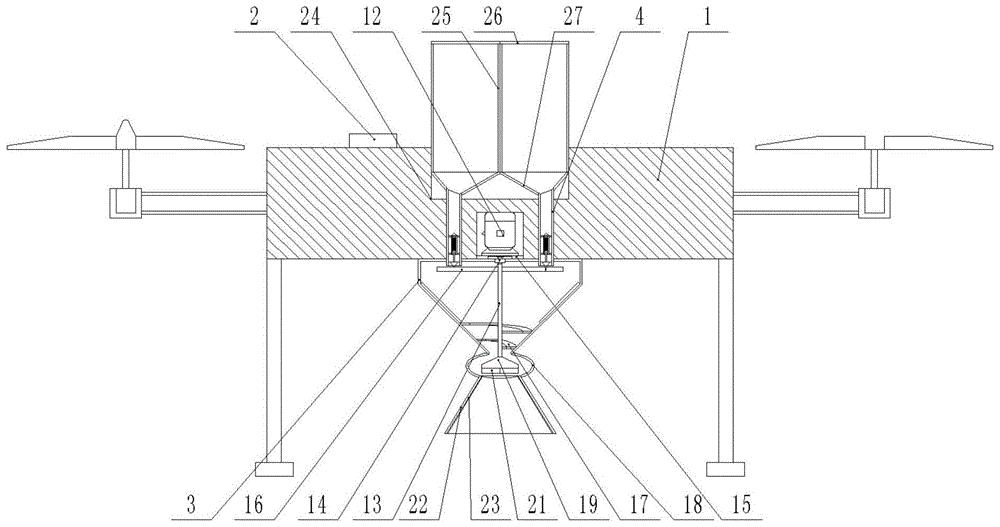
本发明公开了一种可均匀掺混施肥的水稻施肥装置,包括无人机,所述无人机上设有肥料盛放装置,所述无人机上设有控制器,所述无人机下方设有肥料定量快速掺混装置,所述肥料定量快速掺混装置下方设有均匀施肥装置。通过掺混电机的转动带动肥料排放搅拌框进行转动,通过肥料排放搅拌框与尖锥形搅拌杆的配合,从而使方形施肥盛放筒内的肥料能够定量的进行排放,再通过螺旋搅拌框的搅拌、掺混轴带动圆锥形挡板的转动,使尖锥形搅拌杆的高速转动将肥料进行再次掺混,有效的保证了肥料掺混的充分,同时通过尖锥形搅拌杆的高速转动将肥料击飞,从而使肥料快速的施肥到水稻稻田内,有效的保证了肥料施肥的均匀。
精品 B64D1/18
本实用新型涉及一种无人机及其专用喷雾系统。本实用新型所述喷雾系统包括脱扣式主挂架组件和吊具组件,脱扣式主挂架组件包括脱扣母块,其上设有通/断电保持电磁组件、预压力顶出组件和液腔,通/断电保持电磁组件在通/断电时具有磁性,在断/通电后失去磁性;预压力顶出组件能够储存弹性预压力;液腔设有快插连接口;吊具组件包括磁吸盘、压下面、快插接头和喷杆,磁吸盘与所述通/断电保持电磁组件磁吸连接,快插接头与所述快插连接口适配连接,压下面与所述预压力顶出组件相配合,压下面对预压力顶出组件施加弹性预压力;喷杆上设有喷嘴。本实用新型可有效提高无人机喷洒机具对靶精准率,减少雾滴漂移,同时保证无人机安全。


 粤公网安备44011202003051号
粤公网安备44011202003051号